

© Google
Les chercheurs de Google AI ont observé les premiers résultats de leur projet visant à reproduire des mouvements d'animaux avec plus d'efficacité.
Si l'apprentissage par imitation n'a rien de neuf (y compris dans le secteur de la robotique), l'équipe est parvenue à simplifier le procédé pour que tout repose sur la machine.
Un apprentissage plus facile
L'objectif du projet, qui a été mené en partenariat avec l'Université de Californie, à Berkeley, était de trouver un moyen de transférer efficacement et de manière automatisée ce que Google appelle des « comportements agiles » à un robot. Dans son post de blog dédié, le géant affirme : « Que ce soit un chien qui court après une balle ou un cheval qui saute par-dessus des obstacles, les animaux peuvent facilement exécuter un répertoire incroyablement riche de compétences agiles ».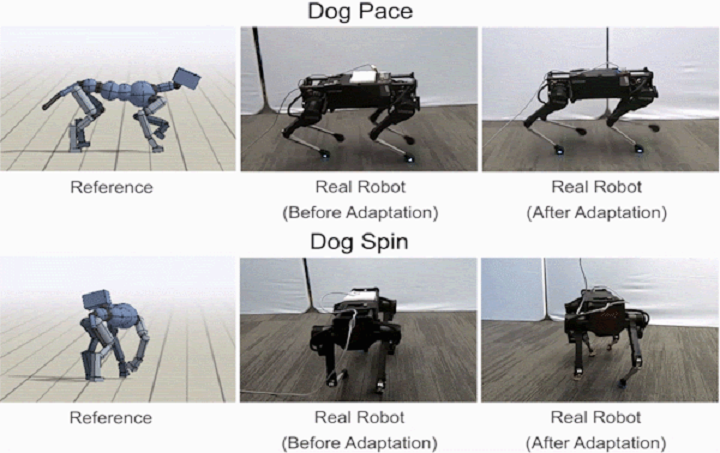
© Google
Cependant, il ajoute : « Le développement de robots capables de reproduire ces comportements agiles peut ouvrir des opportunités de déploiement de robots pour des tâches sophistiquées dans le monde réel. Mais concevoir des contrôleurs qui permettent aux robots à pattes d'exécuter ces comportements agiles peut être une tâche très difficile ». En règle générale, les robots apprennent des êtres vivants en détectant leurs mouvements et en les reproduisant. Mais cet apprentissage n'est pas parfait, et les scientifiques doivent généralement intervenir afin que le robot ne tombe pas au moindre imprévu. Ces interventions demandent du temps et retardent la mise au point finale de l'appareil.
« Randomiser » pour simplifier
Pour surmonter cette difficulté, les chercheurs ont ajouté à leur chien-robot (appelé Laïkago en référence à Laïka, le premier être vivant mis en orbite) une « randomisation de la dynamique de la simulation ». En d'autres termes, ils ont fait varier différentes caractéristiques du robot - son poids, par exemple - afin de forcer la machine à s'adapter à de petites variables. L'ensemble des données est disponible sur GitHub.Un « apprentissage de l'aléatoire » qui a rendu la méthode de transfert beaucoup plus robuste. Désormais, le robot est en mesure de reproduire la marche d'un chien en tenant compte de petits aléas. Il est aussi capable d'apprendre d'autres mouvements plus complexes, comme un saut ou le fait de courir après sa queue (s'il en avait une). Et s'il a besoin d'un petit peu plus de temps pour terminer son apprentissage, les chercheurs n'ont plus besoin d'intervenir pour le parfaire.
TechCrunch précise : « Avec ces compétences de base intégrées, le robot a pu se déplacer dans sa zone d'entraînement en continu sans intervention humaine, apprenant des compétences de locomotion tout à fait respectables ». Google signale qu'une fois formé, le robot peut être contrôlé par une télécommande, l'apprentissage permettant de répondre à des commandes en temps réel.
Le secteur a déjà connu des robots capables de s'adapter aux situations difficiles. Boston Dynamics dispose depuis quelque temps déjà de robots capables de garder l'équilibre ou de monter des escaliers sans les voir. Avec Atlas, Google nous a lui-même présenté il y a quelques années un robot capable de se relever. Mais avec Laïkago, le groupe veut rendre plus simple l'apprentissage des robots.
Source : TechCrunch








